Radiomaster NEXUS

Release Video
Hardware Specifications:
NEXUS Heli Flight Controller
MCU: STM32F722RET6
Gyro (IMU): ICM-42688-P
Flash Memory (Black Box. IC): 128MB (W25N01GVZEIG)
Barometer: SPL06-001
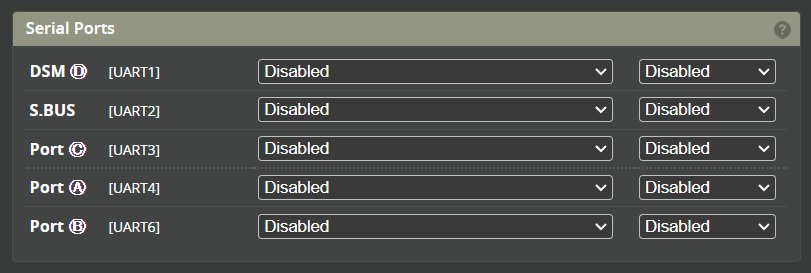
Uart: 6 - DSM[UART1], S.BUS[UART2], A-CRSF[UART4], PORT-B[UART6], PORT-C[UART3]
Servo: 4 - S1, S2, S3, TAIL
Rpm Sensor: 1 - FROM ESC FREQUENCY SENSOR
Receiver Support: CRSF, ELRS, GHOST, S.BUS, SUMD, IBUS, XBUS, EXBUS, PPM, MSP, DSM2, DSMX
Voltage Supply(DC): 5 - 12.6V
A-B-C Serial Port Power Output: 5V - 2.0A
DSM Serial Port Power Output: 3.3V - 0.5A
Telemetry: S.BUS, HoTT, S.Port, MSP, EDGETX, ELRS
ESC: PWM, Oneshot, Multishot, Dshot
Support Tail ESC: 760μs/1520μs Servo
Support Tail Motor: Yes
Demensions: 41.3 X 25.4 X 13.1mm
Weight: 16.8g
Rotorflight Target
When updating Rotorflight firmware. Please use the NEXUS_F7.

Matching RP3-H ELRS receiver
Any of the Rotorflight receiver protocols can be used with the NEXUS. Radiomaster does have the RP3-H receiver which is a direct plug and play ELRS receiver.

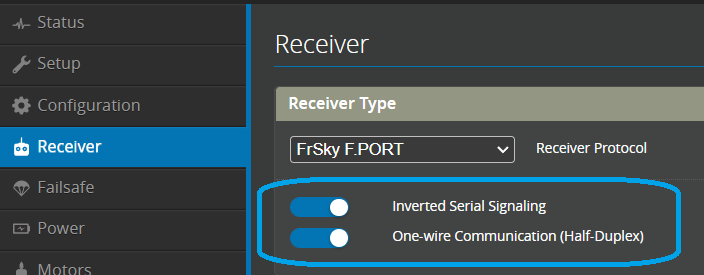
F-Port
Nexus supports F.Port on:
The 'TX' pin of Port A, B or C or by remapping the SBUS to a TX for F.Port.
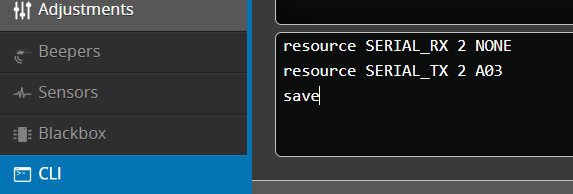
F.Port is an Unverted protocol over a single wire so must configured with both of these options enabled.
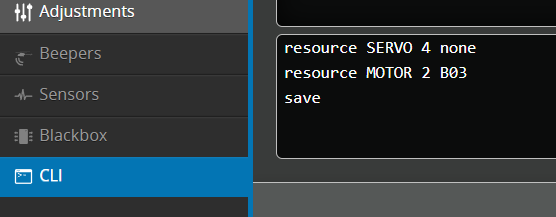
Motorised Tail
To use the NEXUS with a motorised tail the Servo 4 needs to be remapped to Motor 2. This can be done in the CLI using the following command (just copy and past this into the CLI then push [ENTER]).
resource SERVO 4 none
resource MOTOR 2 B03
save
Wiring
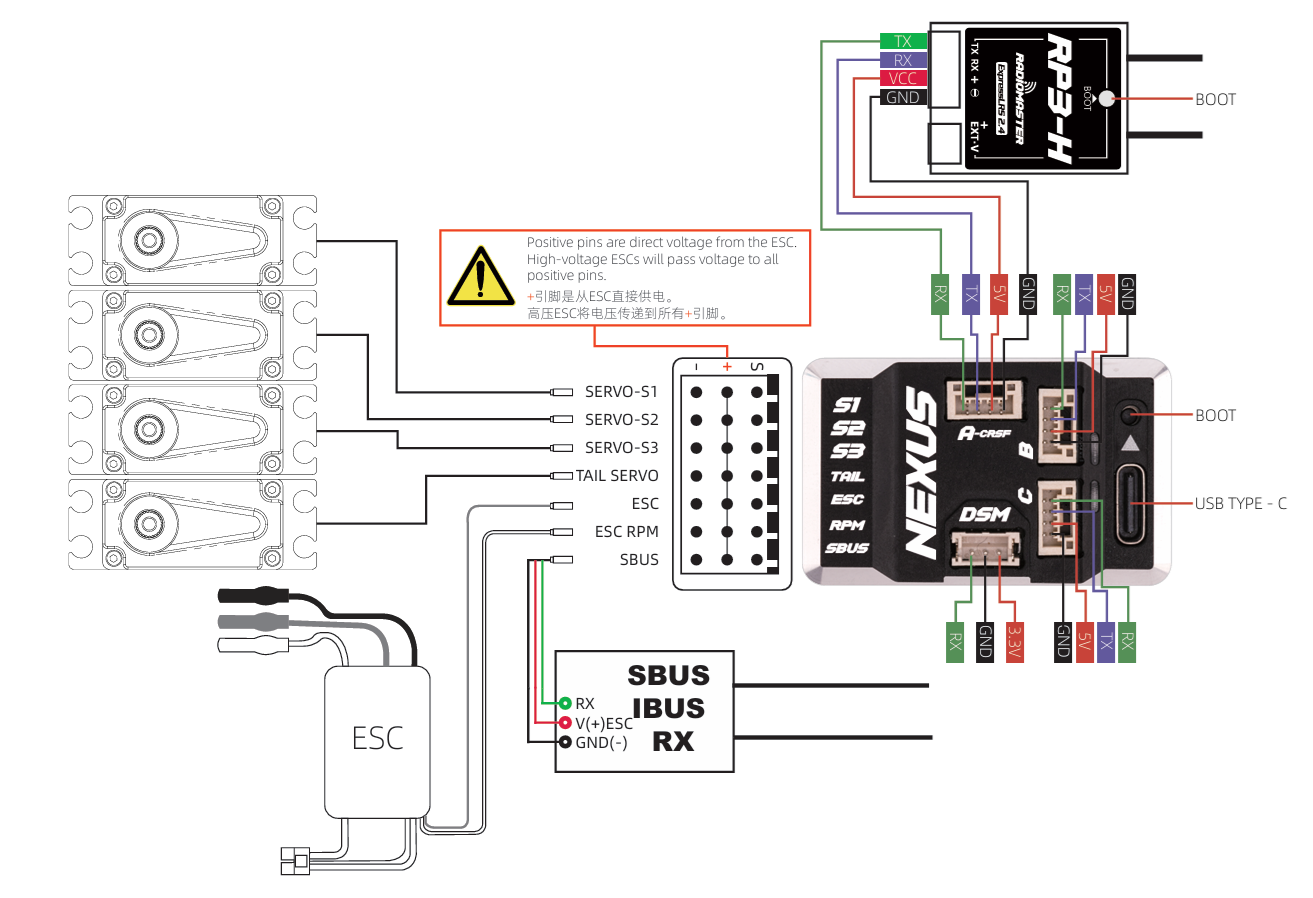
UART ports
All the UARTS on the NEXUS are labeled to match each port. Just enter the function you wish to use for each port such as SerialRx (receiver), ESC Telemetry, blackbox, GPS etc.