Flydragon V2.2

Hardware Specifications:
MCU: STM32F722RET6
IMU: BMI270
Black Box: W25N01G (128MB)
Baro: SPL06 (I2C2)
LED: WS2812
Beeper: 5V Active Buzzer
USB: Type-C
UARTS: UART2,UART3,UART5
I2C: I2C1
ADC: ADC1 (12S)
Servo Pins: CH1-CH4
RPM Inputs: RPM_E (ESC RPM Wire),RPM_S (External RPM Sensor)
Internal Receiver: ELRS Diversity Receiver 2.4G (UART1)
External Receiver: CRSF, S.BUS, F.PORT, GHOST, SUMD, SUMH, IBUS, XBUS, XBUS/RJ01, EXBUS, PPM, MSP, DSM (Needs 3.3V step
down BEC module)
BEC Voltage: 5-15V
5V Power Output: 5V-1.5A
Dimensions: 45mm x 27mm x 14.5mm
Weight: 27g
Receiver specifications:
MCU:ESP8285
RF:SX1280
LAN/PA:SE2431L
Active crystal oscillator:TCXO 52MHz
Antenna:2 sticks ipex1 200mm 2.4GHz
RF frequency:2.4GHz (2400-2480GHz)
Transmit power:100mW (MAX)
Maximum accepted refresh rate:500HZ/F1000HZ
Firmware version:v3.3.2
Firmware target:FlyDragonRC 2.4 GHz / FD R24D 2.4GHz RX
Rotorflight Target
When updating Rotorflight firmware. Please use the FLYDRAGONF722_V2_2 target.
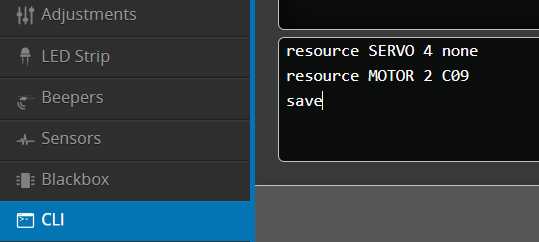
Motorised Tail
To use the Flydragon with a motorised tail the Servo 4 needs to be remapped to Motor 2. This can be done in the CLI using the following command (just copy and past this into the CLI then push [ENTER]).
resource SERVO 4 none
resource MOTOR 2 C09
save
Wiring
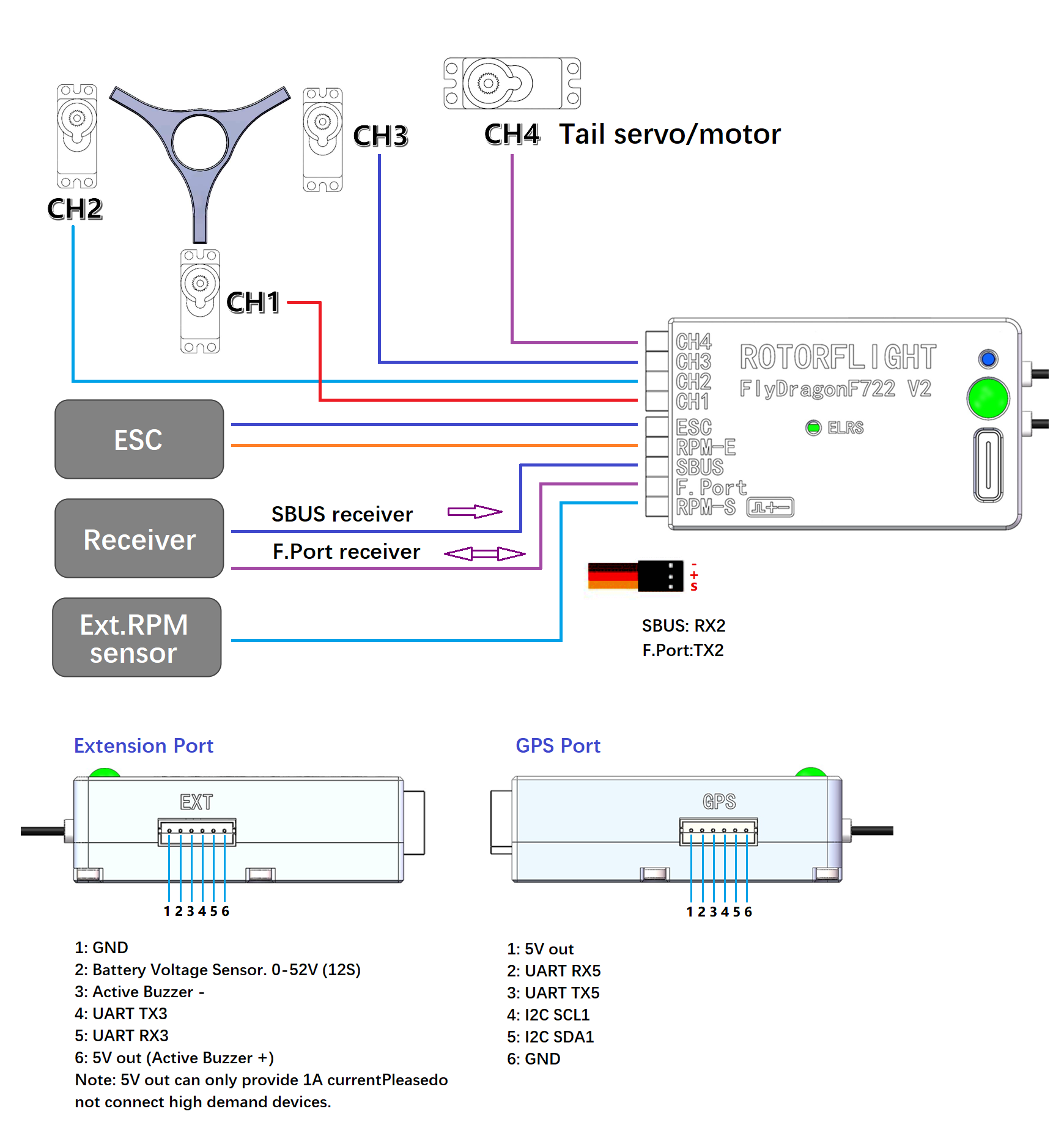
WARNING: The RPM-S Port is powered via the internal 5V supply which is also powered during USB connection. If you have any power supplies connected or innapropriate loads you are likely to damage your board. DO NOT plug in your ESCs BEC wire into here, many BECs act like a deadshort if you attempt to backfeed them and you WILL blow out the 5V supply on your board when you connect USB if you do this. Power to the rest of the ports is all common power you can connect whatever to.
UART ports
- UART 1 - Internal ELRS Receiver - (disable as shown below if not used)
- UART 2 - SBUS or FPORT connector
- UART 3 - Rx and Tx on Extension port
- UART 5 - Rx and Tx on GPS port (can also be used for the Receiver)
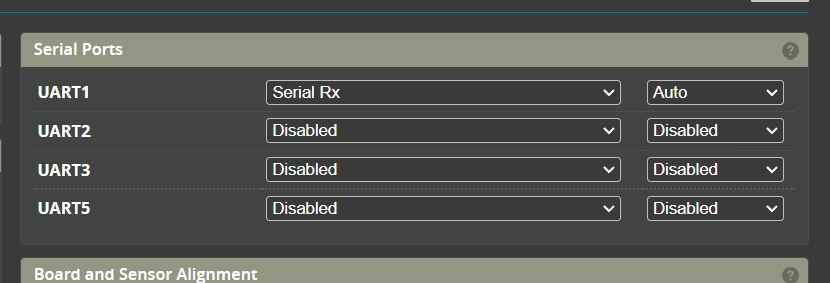
Can I use a receiver other than ELRS?
External receivers can be connected to the SBUS, FPORT or any of the Extension UART ports (UART 3 or 5). If not using the inbuilt ELRS receiver it should be disabled.
How to Enable/Disable the Internal Receiver:
-
The internal receiver is default turned on. When using external receivers, we need to turn it off. Connect the Flydragon F722 V2 to the Rotorflight Configurator. Go to CLI (command line) page:
-
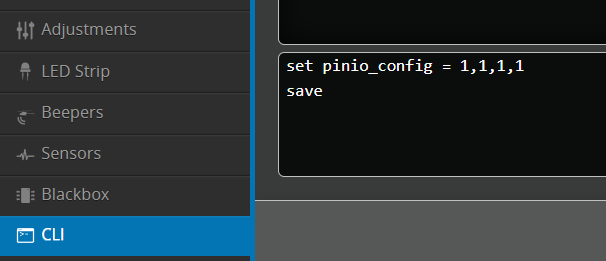
Command to DISABLE the receiver:
set pinio_config = 1,1,1,1
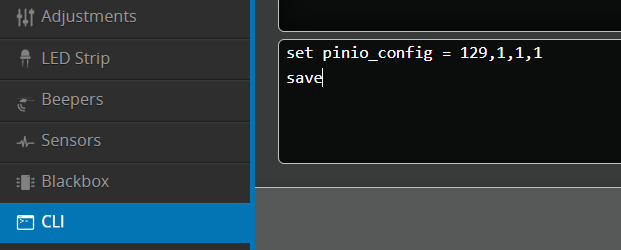
- Command to ENABLE the receiver:
set pinio_config = 1,1,1,1
Manuals
Flydragon V2.2 Flight Controller Manual
Flydragon V2 Flight Controller Manual
Flydragon V2 internal ELRS Manual