Tune the Governor
If using the governor you must first enable the RPM Measurement and configure the Governor
Our goal here is to have a more or less constant headspeed, without any motor oscillations. Ideally the feedforward term should do most of the work, while the P-term is only used for quick corrections. The I-term should maintain the headspeed over time.
But beware: a well tuned governor might generate too much torque for the tail to counteract. If that's the case, you might want to decrease torque by detuning the governor a bit, or reducing the collective range, for example. Alternatively you could try to increase tail authority by using different (bigger) tail rotor blades, or a higher tail rotor speed, for example.
Preparation
- If you're using TTA, disable it by setting TTA gain to 0 on the Profiles tab. You can enable it again once you're done tuning the governor.
- Set Blackbox debug mode to Governor and Blackbox logging rate to 1kHz on the Blackbox tab.
- Start with governor P-gain and I-gain really low, e.g. 10 for P and 20 for I. Spool up might now take a bit longer.
Tuning steps
When you're using the Rotorflight Lua scripts, you can change all gain values on the field. My routine is to make logs of 3 or 4 different values around the default value for one specific gain. Example: the governor F-gain has a default value of 15, so try 10, 15, 20 and 25. Start with 10, do some pitch pumps (give it full collective for a short period of time) and disarm. Change the value to 15 and save, arm, do some pitch pumps, and so on. The result will be one log file with 4 partial logs, which you can select with the dropdown in the upper-right corner of the Blackbox Explorer. Then look in the Blackbox Explorer to see what gain value works best. If you think you might need higher or lower values for a specific gain, make a new log with adjusted values.
Try increments of 10 for the F-gain, increments of 25 for the I-gain and increments of 10 for the P-gain.
1. Tune the F-gain
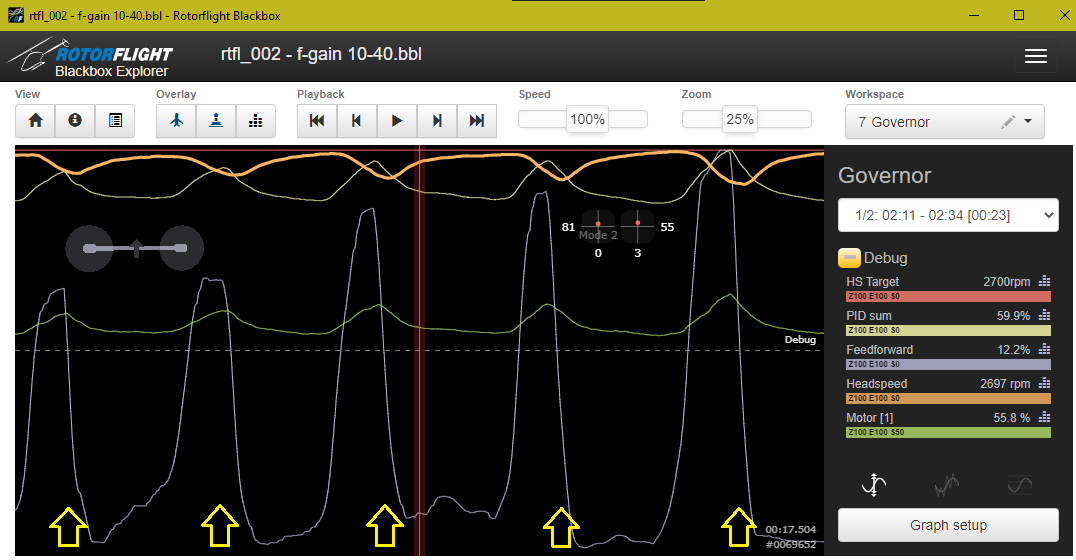
The F-gain determines the feedforward term, together with cyclic and collective precompensation. As stated, the better the F-gain is tuned, the less the PID-loop has to correct. Here's an example where the F-gain is too low, since the headspeed drops quite a bit when doing pitch pumps.
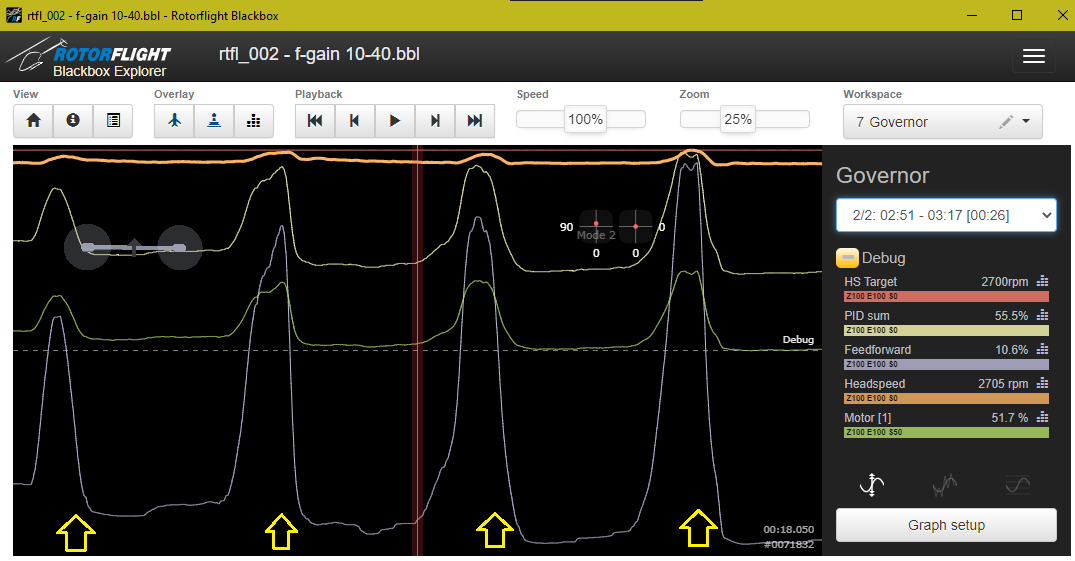
If the F-gain is too high, the headspeed will be temporarily too high.
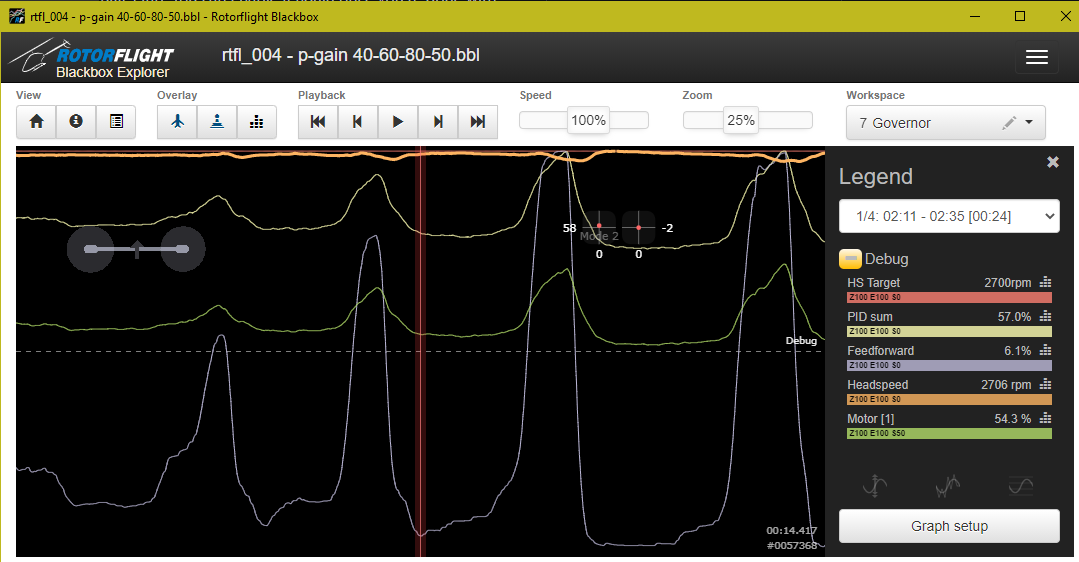
2. Tune I-gain
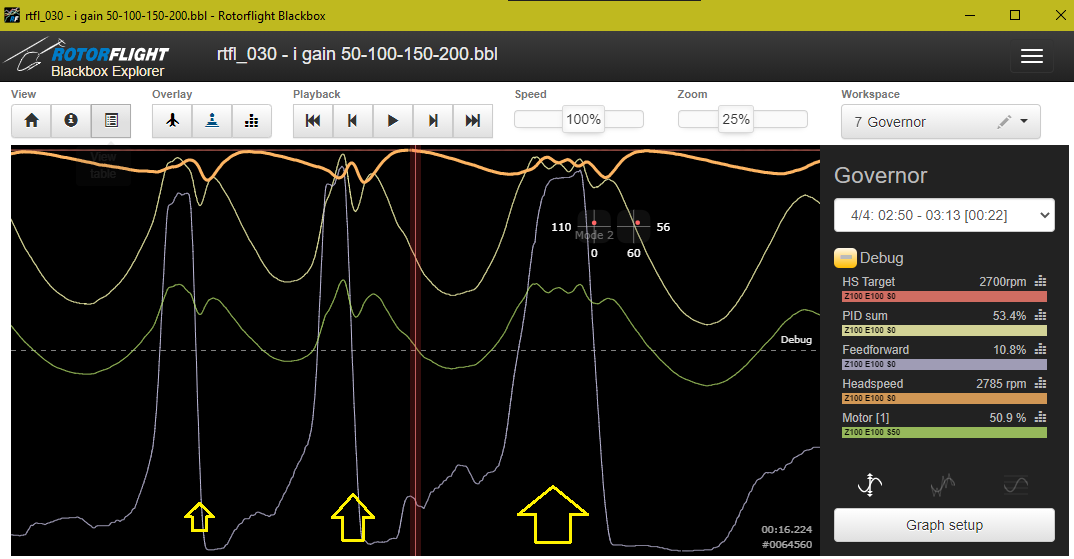
After you have found and set the best value for F-gain you can increase the I-gain until it starts playing up, then reduce it with 1/3. Here you can see an I-gain value which is too high, since there are some slow oscillations during and/or after the pitch pump.
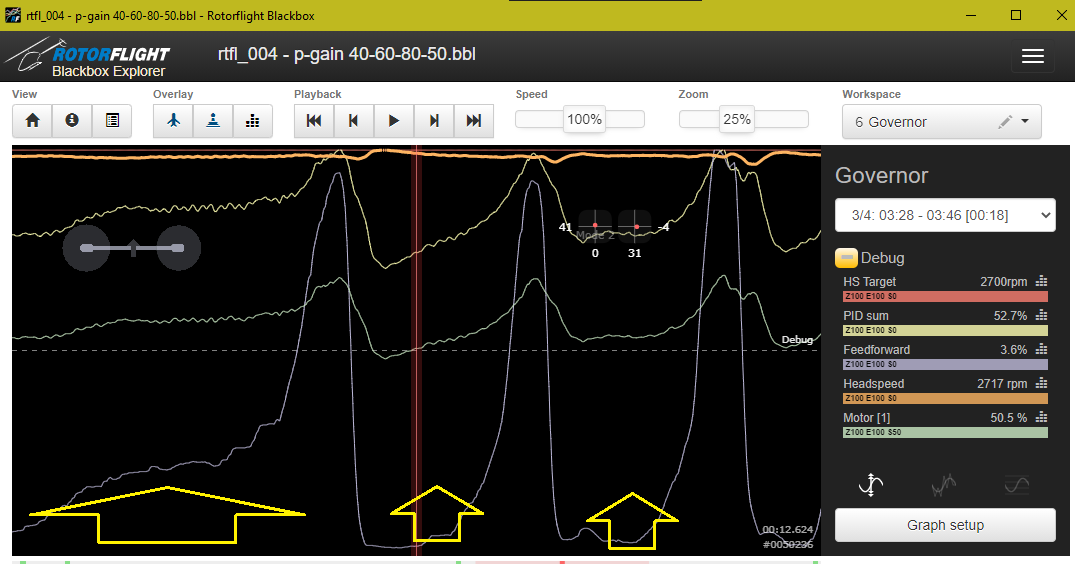
3. Tune P-gain
After setting the optimal value for I-gain start increasing the P-gain till there are slight oscillations, then reduce it with 1/3. Here is an example of a P-gain that is clearly too high and introduces fast oscillations.
4. Tune D-gain
Unless you're flying a 500+ heli you probably won't need D, since there's hardly any momentum in the rotor.
The result
This is the result of tuning a Scorpion HKII-2208 3600KV motor in a Gaui X2.
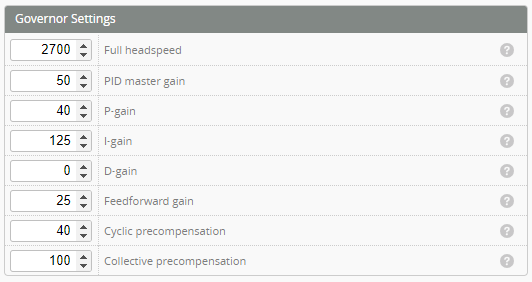
And these are the gain values found for this heli: